


Your shoulder can rotate, lift, and move through an incredible range of motion whilst supporting loads from a few grams to several kilograms. It adjusts force instantaneously, absorbs impacts without damage, and operates reliably for decades. Now try replicating that with motors, gears, bearings, and metal components in roughly the same space.
Every time a robot picks up an object, walks across a room, or manipulates a tool, those joints manage forces and movements in multiple axes simultaneously. They need enough torque to move limbs and carry loads, sufficient speed for natural-looking movement, precise control for accurate positioning, and durability to handle impacts and continuous cycling.
Manufacturing humanoid robot joints requires precision CNC-Bearbeitung to achieve the tight tolerances these demands require. At Yijin Solution, we produce custom joint components engineered for the specific movement requirements, load conditions, and performance parameters your humanoid robot needs. The joints determine what your robot can actually accomplish and getting them right makes all the difference.
Wichtigste Erkenntnisse
- Humanoid joints replicate the rotation, extension, and bending movements humans perform naturally
- CNC machining delivers the tight tolerances and consistent quality joint production demands, ensuring components maintain precision across thousands of movement cycles
- Different joint types serve different functions: revolute joints rotate like elbows and knees, prismatic joints extend linearly, spherical joints enable multi-axis rotation like shoulders, and cylindrical joints combine rotation with linear movement
- Actuators and motors transform electrical signals into physical movement, controlling the speed, force, and position of each joint with the precision robotic tasks require
- Custom-engineered joints tailored to specific applications make the difference between robots that move mechanically and those that achieve smooth, natural-looking motions that match human dexterity
What are Humanoid Robot Joints Anyway?
Humanoid robot joints are the mechanical interfaces that enable movement between connected parts, essentially the robotic equivalent of your elbows, knees, shoulders, and wrists. The engineering centres on creating controlled motion in specific patterns. Each joint type addresses different movement requirements, rotary joints spin around a single axis like your elbow bending, prismatic joints slide linearly for extending reach, and spherical joints rotate in multiple directions like your shoulder socket.
What makes these joints functional isn’t just the mechanical design—it’s the integration with actuators that provide the force and control. The joint itself is the physical structure that defines the movement path and bears the loads, whilst actuators mounted within or alongside the joint deliver the precise forces needed to position and hold the limb. Together, they create the controlled, smooth movements humanoid robots need to interact with their environment effectively.
Why are Humanoid Robot Joints Essential?
Humanoid robot joints play a crucial role in ensuring the robot can carry out human-like movements. These joints are essential for robots to perform complex tasks such as walking, manipulating objects, or performing delicate operations. By providing flexibility, strength, and stability, robot joints enable robots to interact seamlessly with their environment, just as human joints allow us to perform everyday actions.
What Types of Joints are Used in Humanoid Robots?
There are several types of joints used in humanoid robots, each designed to provide a specific range of motion and flexibility. The most common types include:
| Joint Type | Funktion | Anwendungen |
|---|---|---|
| Rotary (Revolute) Joints | Provide rotational motion around a single axis | Robotic arms, industrial robots, and manufacturing tasks |
| Prismatic (Linear) Joints | Provide linear movement along a single axis | Robot grippers, conveyors, and height-adjustment mechanisms |
| Spherical Joints | Allow multi-axis rotation, enabling complex movements | Shoulder joints, wrist joints, humanoid robot arms |
| Cylindrical Joints | Combine rotational and linear motion in one joint | Used in robotic arms with variable reach needs |
These joints offer a variety of degrees of freedom (DOF), enabling humanoid robots to perform a wide range of movements with precision.
How do Actuators Power Humanoid Robot Joints?
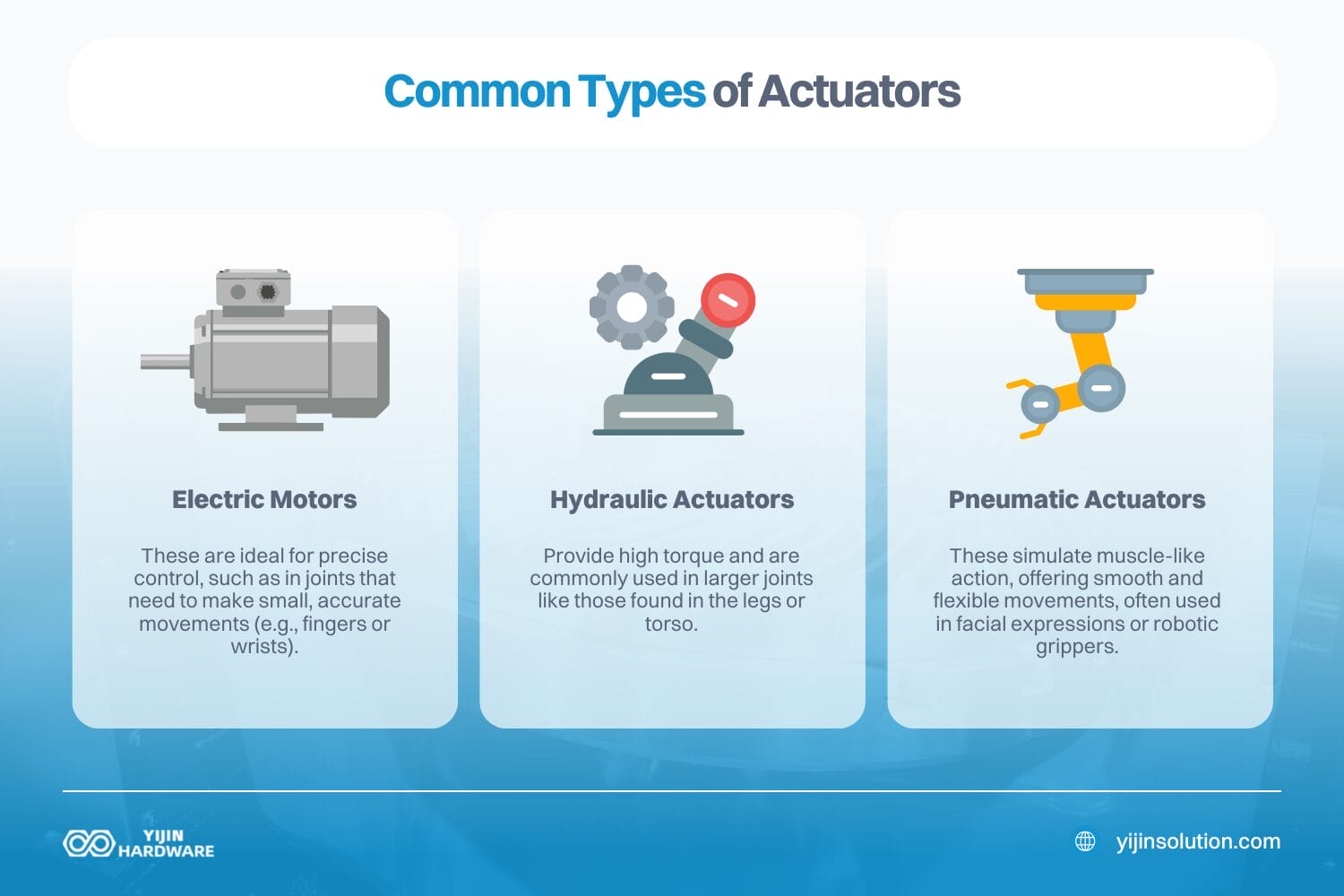
Actuators are the components that power humanoid robot joints, converting energy into motion. The most common types of actuators used in robot joints include:
- Electric Motors: These are ideal for precise control, such as in joints that need to make small, accurate movements (e.g., fingers or wrists).
- Hydraulic Actuators: Provide high torque and are commonly used in larger joints like those found in the legs or torso.
- Pneumatic Actuators: These simulate muscle-like action, offering smooth and flexible movements, often used in facial expressions or robotic grippers.
These actuators work with sensors to provide real-time feedback, ensuring that the joints move accurately and efficiently. By controlling torque and speed, actuators ensure smooth, precise movements in humanoid robots.
How are Sensors Integrated Into Robot Joints for Enhanced Performance?
Sensors are integral to robot joint control, providing real-time data on joint position, speed, and force. These sensors help maintain accuracy and prevent overexertion, ensuring that robots perform tasks efficiently. Key sensors used in humanoid robot joints include:
- Encoders: Measure the position of a joint, ensuring accurate rotational and linear motion.
- Force and Torque Sensors: Monitor the pressure applied to a joint, essential for performing tasks that require a delicate touch.
- Proximity Sensors: Detect nearby objects to prevent collisions and ensure smooth interaction with the environment.
With these sensors in place, humanoid robots can adjust to changing environments and interact more naturally with humans and objects.
How are Humanoid Robot Joints Made?
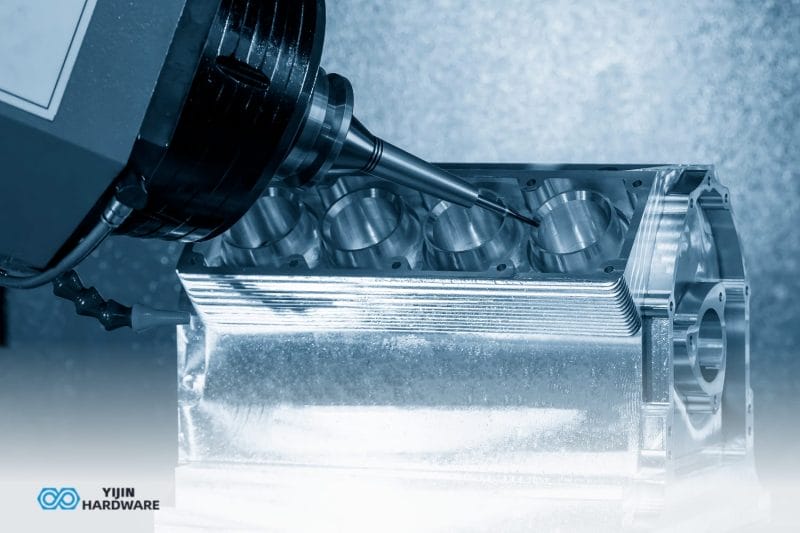
Creating humanoid robot joints requires precise engineering and machining to ensure accuracy and durability. CNC machining plays a critical role in the production of robot joints by creating components with tight tolerances. Materials such as Titan alloys for strength, carbon fiber for lightness, and Aluminium for ease of machining are commonly used. These materials ensure that joints can withstand repetitive motions while remaining lightweight and efficient.
Custom CNC machining allows for the creation of humanoid parts with micron-level precision, making it ideal for the small, intricate components required for humanoid robot joints. This precision is necessary to ensure that the joints function smoothly and reliably over long periods.
What are the Challenges in Designing Humanoid Robot Joints?
Designing humanoid robot joints presents several challenges, including balancing flexibility, strength, and precision. Joints need to provide a wide range of motion while withstanding heavy loads and repeated movement. The materials used must be both lightweight and durable, and the manufacturing process must ensure that joints can function without failure over long periods of operation. CNC machining helps address these challenges by providing precision, allowing for the use of high-performance materials that meet the demands of robotic movement.
How do Degrees of Freedom (DOF) Impact Robot Joints?
Degrees of freedom (DOF) determine how many independent movements a joint can perform. For humanoid robots, having multiple DOF is crucial for mimicking human movement. For example, a humanoid robot leg typically has 6 DOF—3 in the hip, 1 in the knee, and 2 in the ankle. Similarly, arms often have 7 DOF to replicate human arm movement.
More DOF enables a humanoid robot to perform complex, dynamic movements. These joints can rotate, extend, and adjust with greater precision, allowing the robot to perform a variety of tasks such as picking up objects, walking on uneven surfaces, or even engaging in intricate tasks like assembly.
How Can CNC Machining Overcome these Design Challenges?
CNC machining helps overcome many of the challenges involved in designing humanoid robot joints by providing extremely high precision and accuracy. This is essential for ensuring that joints operate smoothly and efficiently. CNC machines can produce parts with micron-level tolerances, allowing for custom designs tailored to each robot’s needs. By using CNC machining, manufacturers can produce joints that are both lightweight and durable, using advanced materials that improve performance and longevity.
Yijin Solution: Premium Humanoid Robot Joints
Humanoid robot joints are integral to achieving lifelike motion in robots. By enabling controlled, flexible movement, these joints allow humanoid robots to perform complex tasks in diverse environments. CNC machining plays a crucial role in manufacturing these joints with the precision and durability needed for real-world applications. From the use of electric and hydraulic actuators to the integration of sensors for real-time control, every element of a humanoid robot joint contributes to its overall performance.
Looking to bring precision and reliability to your humanoid robot projects? Kontaktieren Sie uns heute to discover how our custom CNC machining solutions can help you design and manufacture high-performance robot joints that meet your exact specifications.
Humanoid Robot Joints FAQs
What are robot joints called?
Robot joints are often referred to as actuators. These are mechanical components that enable movement in robotic systems, similar to human joints like elbows and knees.
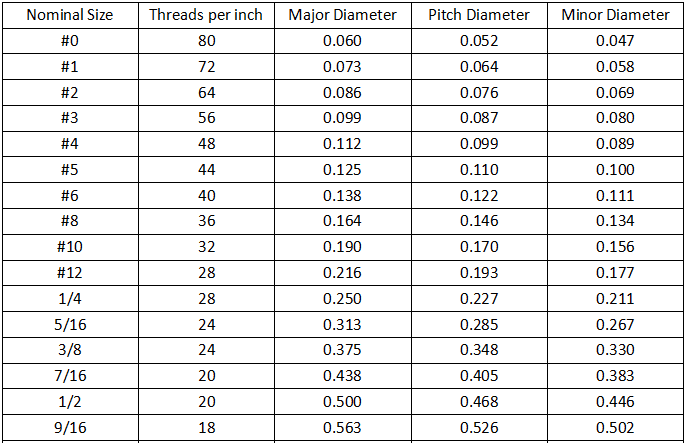
What are the five types of joints used in robotic arms and wrists?
The five types of joints commonly used in robotic arms and wrists are rotary (revolute) joints, prismatic joints, spherical joints, cylindrical joints, and universal joints. Each type provides specific movement capabilities for the robot.
How many joints are in a robot?
The number of joints in a robot varies depending on the design, but typical humanoid robots have between 25 and 40 joints. Each joint is carefully placed to enable precise, human-like movement.
Zurück zum Anfang: Humanoid Robot Joints | Why Humanoid Robot Joints are More Complex than You’d Think