







Гуманоидные роботы стремятся двигаться и вести себя как люди. Эти машины используют специальные части тела, работающие вместе, чтобы выполнять кардинальные и сложные задания, будь то подъем по лестнице, захват хрупких предметов или корректировка движений в зависимости от того, что происходит вокруг. ИИ, машинное обучение и все более совершенные механические системы - все вместе они движутся вперед, и гуманоидная робототехника развивается быстрее, чем многие думают.
Мы разберем основные части, из которых состоит человекоподобный робот, расскажем, что делает каждый компонент и как все они координируются для создания движений, которые выглядят по-настоящему человеческими. Плавная походка, захват предметов с нужным усилием, реакция на окружающую обстановку - то, что еще десять лет назад было бы мечтой, сейчас происходит в лабораториях и на заводах. Как только вы поймете эти детали, вы получите более четкое представление о том, чего уже могут достичь гуманоидные роботы и куда движется эта технология дальше.
Основные выводы
- В голове робота расположены камеры и микрофоны, которые помогают ему понимать, что происходит вокруг, и правильно взаимодействовать.
- Движение обеспечивается двигателями (обычно бесщеточными типа DC), работающими с актуаторами, которые точно управляют суставами - думайте об актуаторах как о мышцах.
- Ходьба на двух ногах требует сложной системы баланса, которая постоянно регулируется, чтобы удерживать робота в вертикальном положении, подобно тому, как это делает ваше внутреннее ухо.
- Искусственный интеллект позволяет роботам подражать поведению людей, учиться на их опыте и справляться с ситуациями, с которыми они раньше не сталкивались.
- Для изготовления каркаса обычно используются титан и алюминий - достаточно прочные, чтобы поддерживать движение, но достаточно легкие, чтобы робот не таскал на себе лишний вес.
Из чего состоит человекоподобный робот?

Гуманоидный робот состоит из нескольких ключевых компонентов, которые работают вместе, чтобы создать движения и взаимодействие, напоминающие человеческие возможности. Компания Yijin Solution прилагает все усилия для того, чтобы производство этих гуманоидные части возможно. Вот из чего состоят эти машины:
- Глава: Содержит камеры, датчики LIDAR и микрофоны, которые позволяют роботу видеть, составлять карту окружения и слышать происходящее. Эти датчики помогают ему распознавать лица, ориентироваться в пространстве и естественно взаимодействовать с людьми. Голова также обрабатывает информацию об окружающей среде, чтобы робот мог самостоятельно принимать решения о том, что делать дальше.
- Торс: Действует как центральная структура, в которой размещаются такие важные системы, как батареи, блоки управления и процессоры. Он поддерживает руки, ноги и голову, сохраняя при этом равновесие и служа координационным центром для всех движений тела робота.
- Руки и кисти: Наделите робота способностью захватывать предметы и физически взаимодействовать с окружающей средой. Руки обычно двигаются с 7 степенями свободы (это означает, что они могут поворачиваться и позиционироваться в разных направлениях), в то время как руки используют датчики силы и тактильные сенсоры для захвата предметов с соответствующим давлением - достаточно деликатным для яйца и достаточно сильным для инструмента.
- Ноги и ступни: Позволяет роботу ходить на двух ногах, как это делают люди. Эти конечности используют гидравлические или пневматические приводы (системы, работающие под давлением и создающие движение), чтобы ходить, бегать и даже прыгать. Датчики силы в ногах постоянно контролируют давление и контакт с землей, помогая сохранять равновесие во время движения.
Внутреннее устройство Tesla Optimus: Основные компоненты

Гуманоидный робот Optimus компании Tesla состоит из ключевых компонентов, которые позволяют ему выполнять задачи, похожие на человеческие. На диаграмме ниже показаны эти основные части:
Ключевые компоненты Tesla Optimus:
- Голова (大脑): Датчики зрения, включая камеры и LIDAR, для навигации и распознавания лиц. Микрофоны позволяют распознавать речь и взаимодействовать с окружающей средой.
- Торс (电池组): Содержит аккумуляторную систему и контроллер, служащие основным центром обработки данных и источником энергии для робота.
- Руки и кисти (灵巧手): Оснащен 7 DOF, что позволяет выполнять ловкие движения, такие как подъем и захват. Тактильные датчики в руках обеспечивают точность при манипулировании объектами.
- Суставы (旋转关节): Вращательные суставы в руках и ногах, приводимые в движение гидравлическими и пневматическими приводами, обеспечивают плавное движение, подобное человеческому.
- Ноги (线性关节): Отвечая за двуногую локомоцию, линейные приводы в ногах помогают поддерживать равновесие и динамическую устойчивость во время движения.
- Трансмиссия (力矩传感器): Датчики крутящего момента измеряют и регулируют силы, действующие на робота, обеспечивая точность движения и баланс.
- Электронная интеграция (电子设备集成): Центральная система управления объединяет все датчики и исполнительные механизмы для эффективной связи, обеспечивая плавное, скоординированное движение.
Способность робота Tesla Optimus имитировать поведение человека и выполнять поставленные задачи обусловлена интеграцией этих передовых компонентов, работающих на основе искусственного интеллекта и роботизированных систем управления.
Какую роль играют двигатели в гуманоидных роботах?
Двигатели необходимы гуманоидным роботам для обеспечения их движения. В зависимости от требований задачи используются различные типы двигателей:
- Двигатели BLDC: Эти бесщеточные двигатели постоянного тока обеспечивают высокую эффективность и точность. Они используются в различных роботизированных соединениях и системах приведения в действие, обеспечивая плавное и бесшумное движение при минимальном обслуживании.
- Серводвигатели: Серводвигатели используются для точного управления, позволяя роботу вносить небольшие и точные коррективы в свои движения. Эти двигатели жизненно важны для задач, требующих высокой точности, таких как манипулирование роботизированной рукой.
- Бескаркасные моментные двигатели: Эти двигатели компактны и эффективны, обеспечивают высокий крутящий момент при низкой инерции. Они часто используются в роботизированных соединениях, где пространство ограничено, но требуется высокая точность и прочность.
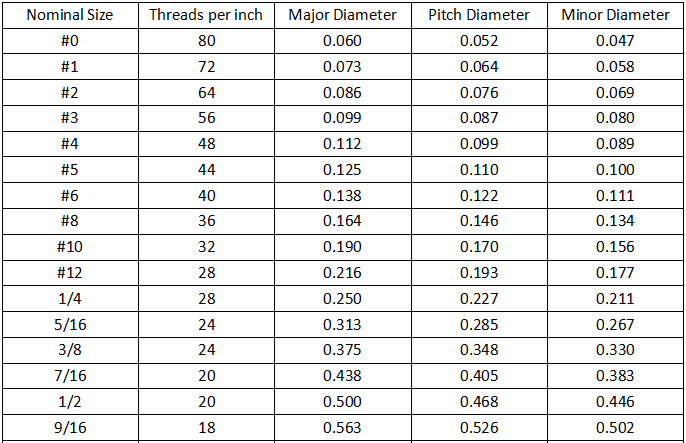
Сравнение двигателей для гуманоидных роботов
| Тип двигателя | Основные характеристики | Приложение | Typical Output |
|---|---|---|---|
| Двигатели BLDC | Длительный срок службы, низкая стоимость обслуживания, высокая точность | Общие механизмы и приводы | 100–500 W, efficiency above 90% |
| Серводвигатели | Управление по замкнутому циклу, точное позиционирование | Движение суставов и тонкие манипуляции | Positioning within 0.1°, torque 0.5–10 Nm |
| Бескаркасные моментные двигатели | Высокая плотность крутящего момента, компактная конструкция | Роботизированные соединения, требующие высокой точности и прочности | Continuous torque up to 30 Nm in direct drive |
Эти двигатели в сочетании с актуаторами обеспечивают гуманоидным роботам возможность выполнять широкий спектр движений, от простых задач до сложных действий.
Как датчики позволяют гуманоидным роботам взаимодействовать с окружающей средой?
Датчики играют важнейшую роль в способности человекоподобного робота воспринимать окружающий мир и взаимодействовать с ним. Эти датчики делятся на два типа:
- Проприоцептивные датчики: Эти внутренние датчики отслеживают собственные движения робота. Акселерометры и гироскопы помогают роботу понять свою ориентацию и соответствующим образом скорректировать положение. Датчики силы измеряют силы, действующие на суставы робота, что помогает точному движению и динамическому равновесию.
- Экстероцептивные датчики: Эти датчики позволяют роботу воспринимать окружающую обстановку. Датчики зрения (например, камеры и LIDAR) помогают обнаруживать препятствия, распознавать лица и ориентироваться в окружающей среде. Микрофоны обеспечивают распознавание речи, позволяя роботу понимать команды человека и реагировать на них.
Вместе эти датчики составляют основу способности робота взаимодействовать с людьми и адаптироваться к окружающей обстановке.
Как приводы способствуют движению и точности?
Актуаторы - это устройства, преобразующие электрическую энергию в механическое движение, что позволяет роботам-гуманоидам выполнять такие задачи, как ходьба, захват и манипулирование предметами. Существует несколько типов актуаторов, используемых в гуманоидных роботах:
- Электрические приводы: Эти приводы, используемые в двигателях BLDC и серводвигателях, обеспечивают высокую точность и контроль, что делает их идеальными для деликатных задач, таких как манипулирование мелкими предметами.
- Гидравлические приводы: Эти приводы обеспечивают высокий крутящий момент, что делает их пригодными для задач, требующих силы, например, для подъема тяжелых предметов или выполнения сложных задач.
- Пневматические приводы: Эти приводы часто используются для задач, требующих гибкости, например, для имитации мышц и суставов в мягком роботе.
Выбрав правильный тип привода, гуманоидные роботы могут достичь необходимого баланса между прочностью и точностью для различных приложений.
What Gearboxes and Reducers Do Humanoid Robot Joints Use?
Motors spin fast but produce little torque on their own. Gearboxes and reducers fix this. They trade speed for torque. A fast, low-force motor becomes the slow, powerful motion a joint needs to lift an arm or hold a stance. The reducer sits between the motor and the joint, and its design sets how precise and how strong that joint can be.
Three reducer types dominate humanoid robot joints:
- Harmonic drives: Also called strain wave gears, these deliver a high reduction ratio in a single compact stage, commonly 30:1 to 160:1. They run with near-zero backlash, which makes them the standard choice for arm, wrist, and shoulder joints that need fine positioning. The trade-off is a lower torque ceiling for their size, and the flexible gear element wears over time.
- Planetary gearboxes: These spread load across multiple gears, giving high torque density and efficiency above 90%. Ratios run from about 3:1 to 10:1 per stage and stack higher when needed. They suit high-load joints like hips and knees, though they carry slightly more backlash than a harmonic drive.
- Planetary roller screws: These convert a motor’s rotation into linear push and pull. They handle far higher loads and last longer than ball screws, which makes them the choice for the linear actuators that drive legs. Load capacity reaches several kilonewtons in a package small enough to fit inside a limb.
The reducer choice shows up directly in published actuator specs. Tesla’s Optimus uses three rotary actuators rated at 20, 110, and 180 Nm, paired with three linear actuators rated at 500, 3,900, and 8,000 N. The high-torque rotary figures come from harmonic and planetary reduction, while the 8,000 N linear output comes from a planetary roller screw.
Reducer comparison for humanoid joints
| Reducer Type | Typical Ratio | Key Trait | Лучшее для |
|---|---|---|---|
| Harmonic drive | 30:1 to 160:1 | Near-zero backlash, compact | Arms, wrists, shoulders |
| Planetary gearbox | 3:1 to 10:1 per stage | High torque density, efficient | Hips, knees, high-load joints |
| Planetary roller screw | Rotary to linear | High load, long service life | Linear leg actuators |
Reducer performance depends on the precision of the gear components inside it. Backlash, wear life, and torque capacity all trace back to how tightly the gears, flexsplines, and housings are machined. At Yijin Solution, we machine these компоненты гуманоидных роботов from titanium and aluminum to tolerances as tight as ±0.02 mm, so the assembled joint holds its accuracy through its full service life.
Как гуманоидные роботы достигают двуногой ходьбы и равновесия?
Бипедальная локомоция - одно из самых сложных движений, которые могут выполнять гуманоидные роботы. Чтобы добиться этого, роботы используют комбинацию передовых систем управления, датчиков и исполнительных механизмов. Ключевыми компонентами, участвующими в ходьбе и равновесии, являются:
- Суставы ног: Гуманоидные роботы используют 3 DOF в бедре, 1-2 DOF в колене и 2 DOF в лодыжке, чтобы имитировать движения ног, похожие на человеческие. Эти суставы позволяют роботу корректировать позу и плавно ходить.
- Контроль баланса: Управление точкой нулевого момента (ZMP) используется для обеспечения устойчивости во время движения. Эта система удерживает центр тяжести робота в стабильной области, предотвращая его падение.
- Датчики стопы: Датчики силы в ногах помогают отслеживать взаимодействие робота с землей, корректируя его движения и обеспечивая стабильную ходьбу.
Эти технологии позволяют гуманоидным роботам совершать двуногую ходьбу, сохраняя динамическое равновесие в различных условиях.
Какие материалы используются в гуманоидных роботах?
Материалы, используемые в гуманоидных роботах, имеют решающее значение для обеспечения их легкости, прочности и долговечности. К распространенным материалам относятся:
- Алюминий: Легкий и прочный, идеально подходит для рамы и подвижных частей робота.
- Титан: Часто используется в соединениях и деталях, требующих повышенной прочности и долговечности.
- Углеродное волокно: Обеспечивает прочность без дополнительного веса, что делает его идеальным для роботизированных конечностей и движущихся частей.
Благодаря этим материалам робот-гуманоид способен выдерживать механические нагрузки при движении, сохраняя при этом энергоэффективность.
Будущее человекоподобных роботов
Гуманоидные роботы - это сложные машины, сочетающие в себе передовую робототехнику, искусственный интеллект и новейшие инженерные разработки. Их части тела, включая двигатели, приводы и датчики, работают вместе, чтобы выполнять задачи, которые в точности имитируют человеческие движения. По мере совершенствования таких технологий, как машинное обучение, искусственный интеллект и гидравлические приводы, возможности гуманоидных роботов будут расширяться.
В таких отраслях, как автоматизация, запуск робототехники и взаимодействие человека и робота, человекоподобные роботы должны произвести революцию в рабочих процессах, помочь людям и справиться со сложными задачами. С развитием искусственного интеллекта и сенсоров эти роботы будут продолжать развиваться, выполняя еще более человекоподобные задачи с растущей ловкостью и точностью. Yijin Solution предлагает высококачественные детали корпуса для роботов-гуманоидов; связаться с нами чтобы узнать больше.
Часто задаваемые вопросы о частях тела гуманоидных роботов
Каково строение тела робота?
Структура тела робота включает в себя голову, туловище, руки, ноги и ступни. В туловище располагаются внутренние системы робота, такие как контроллеры и батареи, а руки и ноги обеспечивают движение. Датчики помогают воспринимать информацию, а исполнительные механизмы обеспечивают мелкую моторику.
Что такое 4 D в робототехнике?
Четыре "Д" робототехники - "скучный", "грязный", "опасный" и "дорогой". Они обозначают задачи, с которыми лучше всего справляются роботы: повторяющиеся (Dull), опасные (Dirty и Dangerous) и дорогостоящие (Dear), что позволяет повысить безопасность и эффективность в этих областях.
Каков 5-й закон робототехники?
Пятый закон робототехники часто называют “законом этики”: Робот должен действовать в интересах людей, учитывая общее благо. Этот закон подчеркивает этичность принятия решений роботами по мере их интеграции в среду обитания человека.
How long do humanoid robot parts last?
Humanoid robot parts last anywhere from a few thousand to tens of thousands of operating hours, depending on duty cycle and load. Structural parts machined from titanium and aluminum outlast the moving components. Harmonic drives, bearings, and roller screws wear first because they carry repeated stress. Tighter machining tolerances and quality materials extend service life and delay replacement.
What maintenance do humanoid robot joints need?
Humanoid robot joints need periodic lubrication, wear inspection, and sensor recalibration. Gearbox grease should be checked and replaced on schedule to protect the gear teeth. Harmonic drives need backlash checks, since rising play signals flexspline wear. Force and position sensors drift over time, so recalibration keeps movement accurate.
Which humanoid robot parts wear out first?
Reducers and bearings wear out first in a humanoid robot. They absorb constant torque cycles and shock loads at every joint. Component precision drives how long they last, so parts cut to tight tolerances from durable alloys hold up longer under repeated motion. Replacing a worn reducer early prevents damage to the motor it drives.
Вернуться к началу: Части тела гуманоидного робота





